|
Для конфигурирования платы DCM4AXIS в программе Mach необходимо в меню Config в меню Ports and Pins сделать следующие настройки :
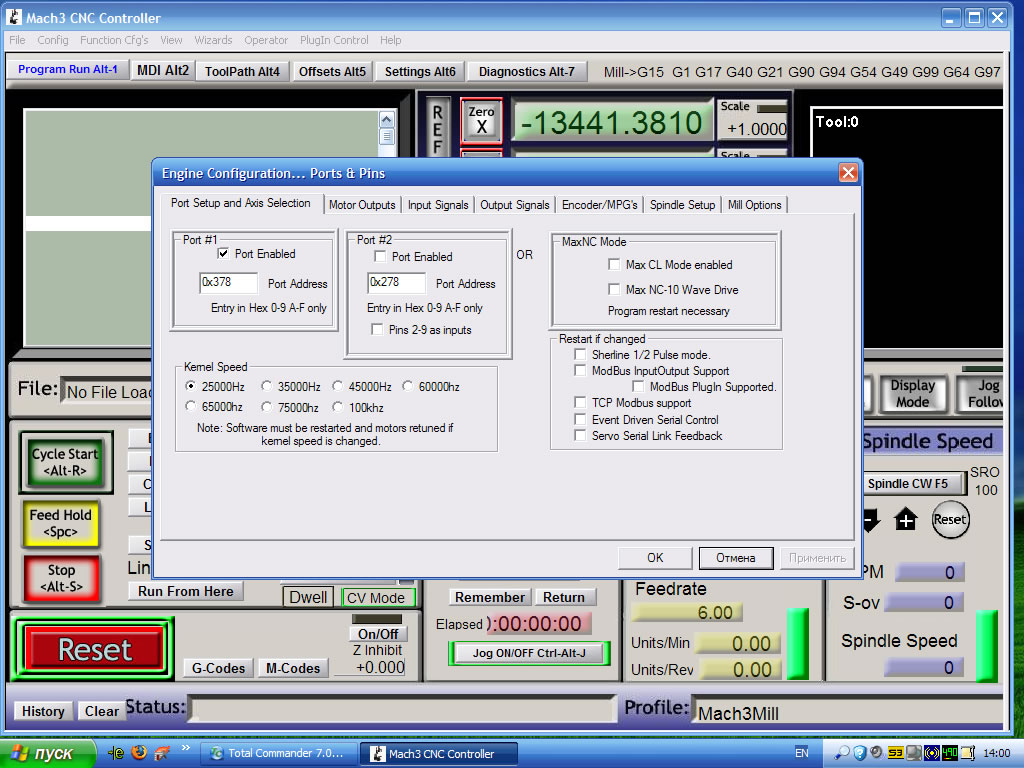
- в закладке Port Setup and Axis Section установить адреса, используемых LPT-портов и скорость порта как показано на рисунке:
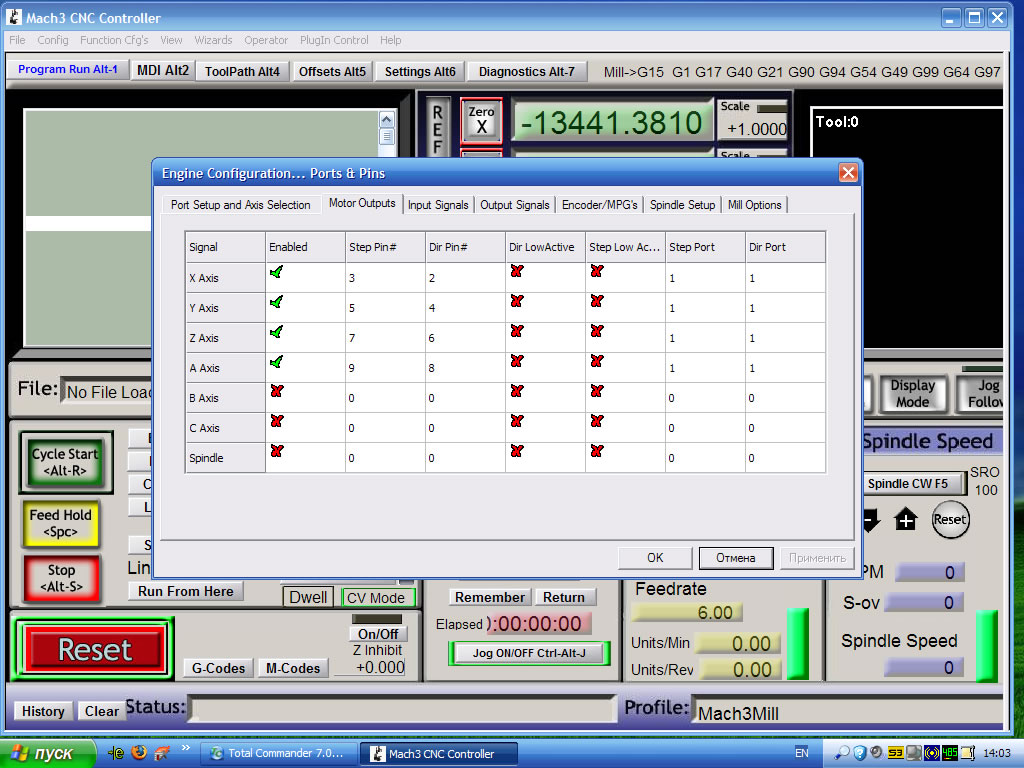
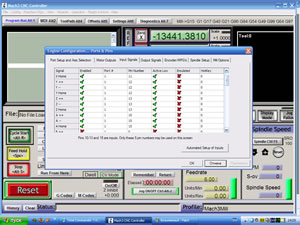
- в закладке Motor Outputs установите выводы LPT-порта, которые будут отвечать за формирование сигналов Step и Dir как показано на рисунке:

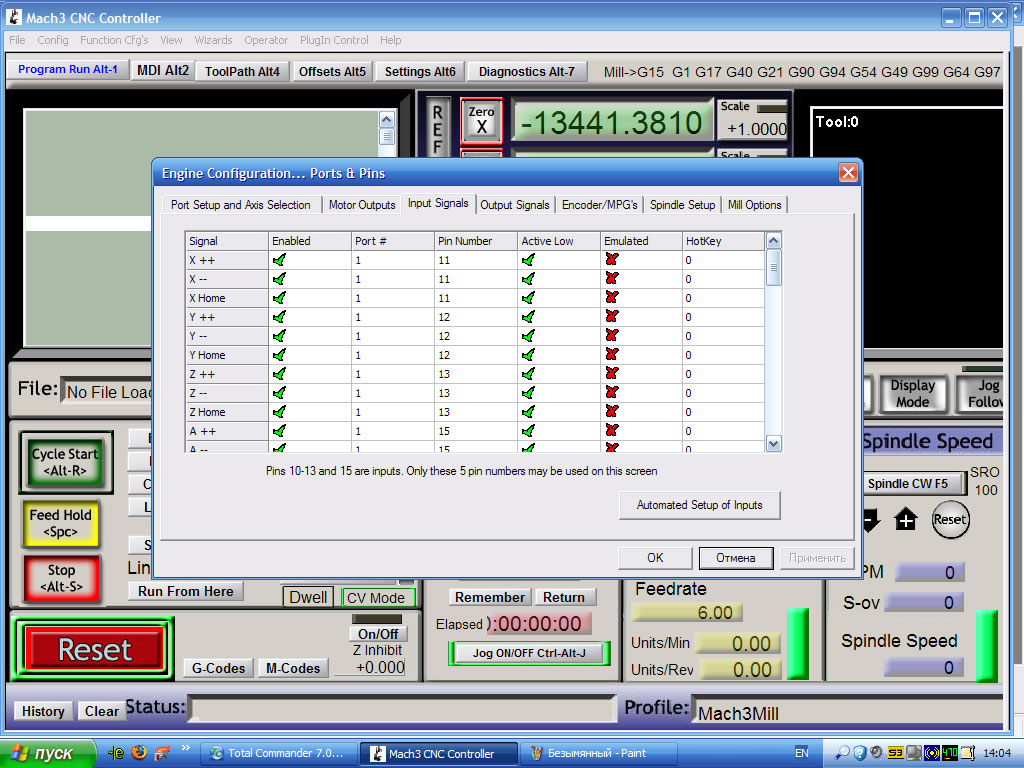
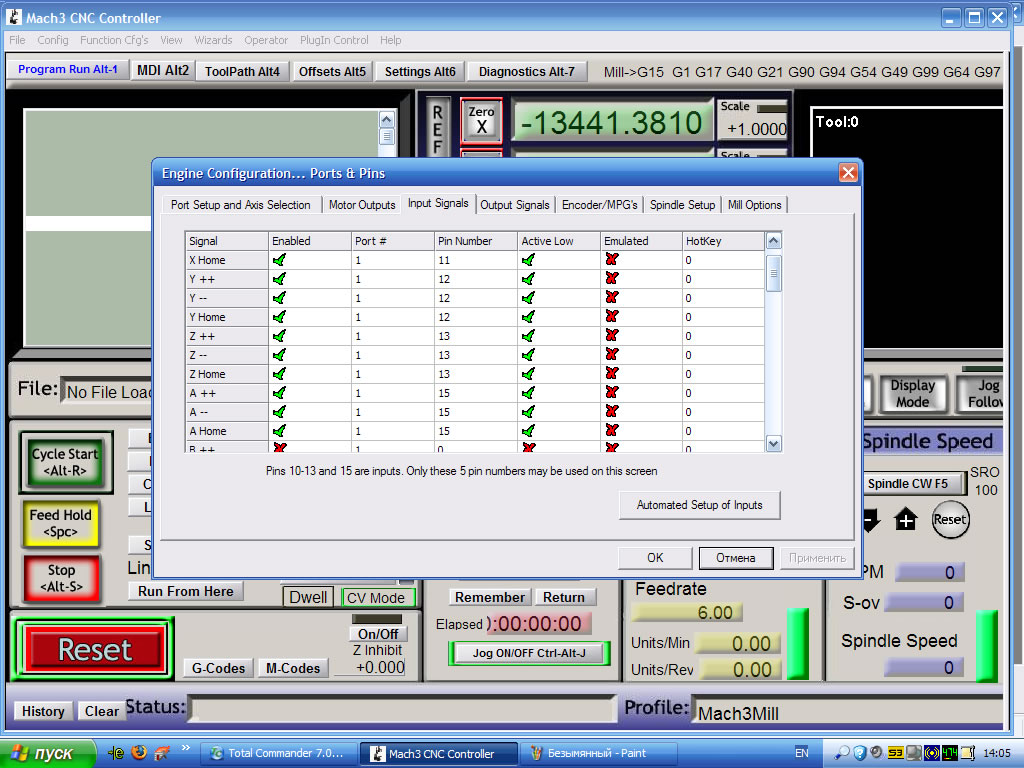
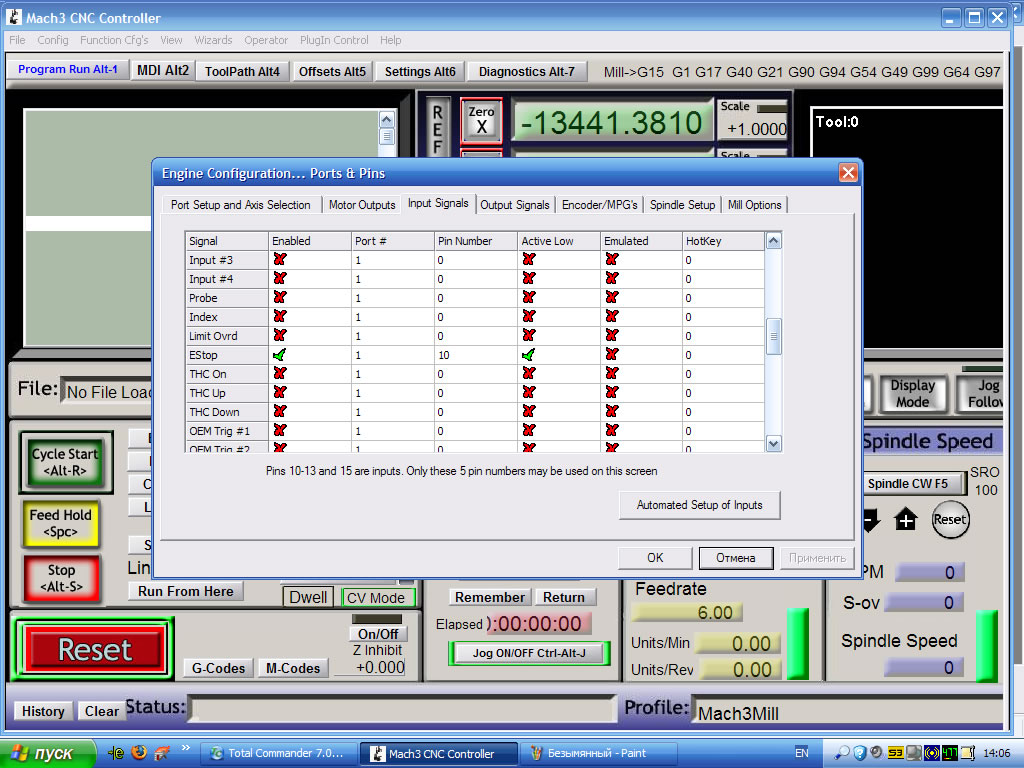
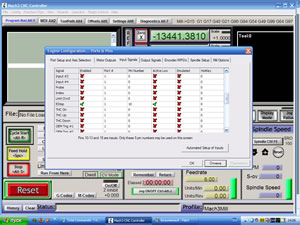
- в закладке Input Signals установите выводы порта, отвечающие за сигналы концевых датчиков X-Limiter, Y-Limiter, Z-Limiter, A-Limiter и кнопки E-Stop как показано на нижеприведенных рисунках:
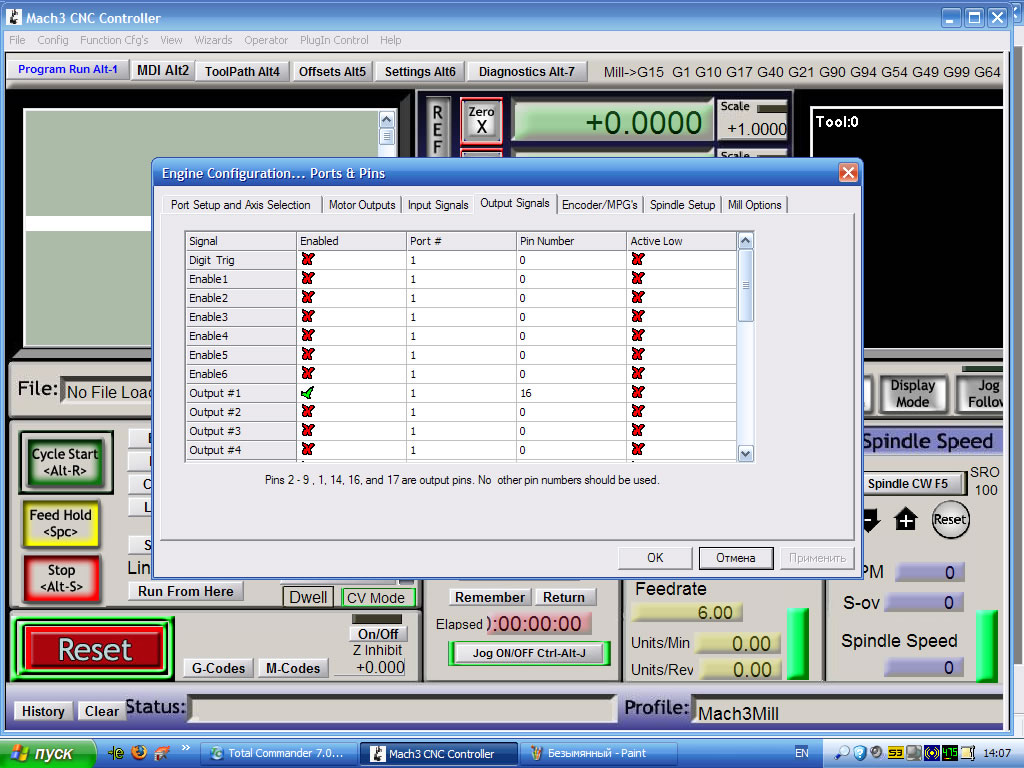
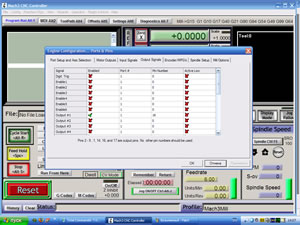
- в закладке Output Signals установите выводы LPT-порта, отвечающие за управление слаботочными реле:
|