Раздел содержит необходимую информацию по конфигурированию и настройке серводрайверов для управления щеточными DC-моторами.
ВНИМАНИЕ! Угол поворота ротора коллекторного DC-двигателя зависит от инкрементов на оборот Вашего энкодера.
Отличительной особенностью серводвигателей на основе щеточных DC - моторов является:
- высокая скорость вращения при сохранении высокого вращающего момента на валу.
- высокая скорость старта (не требуется плавного разгона как у шагового двигателя)
- высокая мощность по сравнению с размером и весом серводвигателя
- высокая эффективность, может достичь 90% при небольших нагрузках
- тихая работа привода
- отсутствие явлений резонанса и вибрации
- ток потребления двигателя прямо пропорционален нагрузке на валу
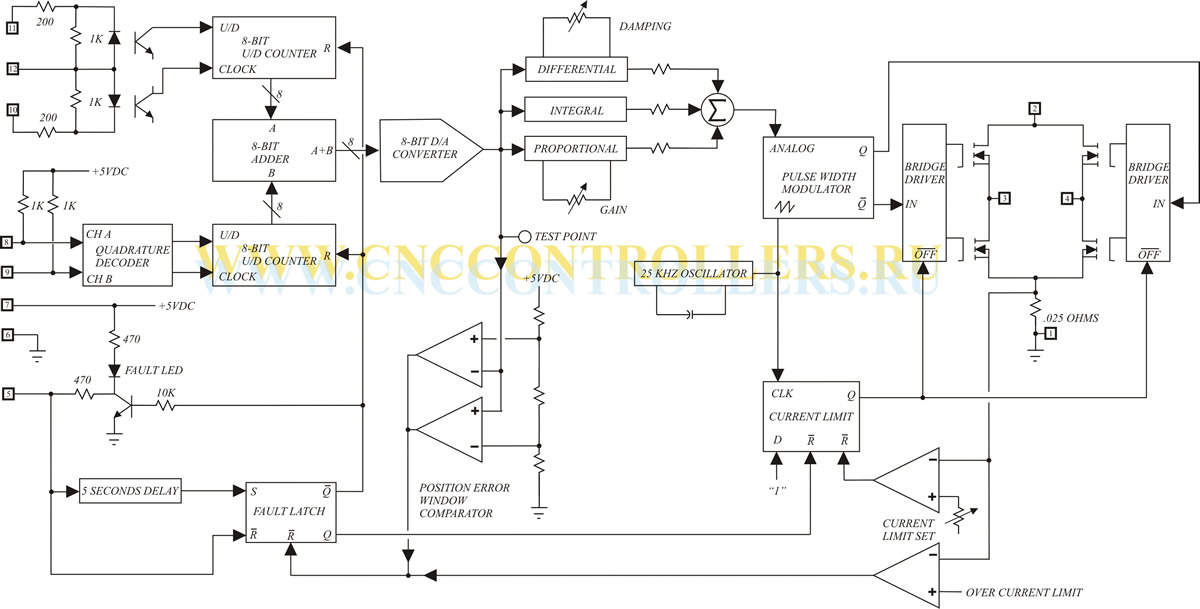
Отличительные особенности серводрайверов ADR920 / ADR940:
- Для управления серводрайверами используются стандартные сиганалы Step, при подачи сигнала на который, вал двигателя поворачивается на 1 инкремент энкодера и сигнал Dir, с помощью которого определяется направление вращения двигателя.
- автоматически корректируют инерционное прокручивание вала двигателя после последнего импульса Step в пределах +/- 128 инкрементов энкодера, т.е. если вал Вашего двигателя по инерции прокрутился в пределах 128 инкрементов, драйвер автоматически установит вал двигателя в требуемое положение.
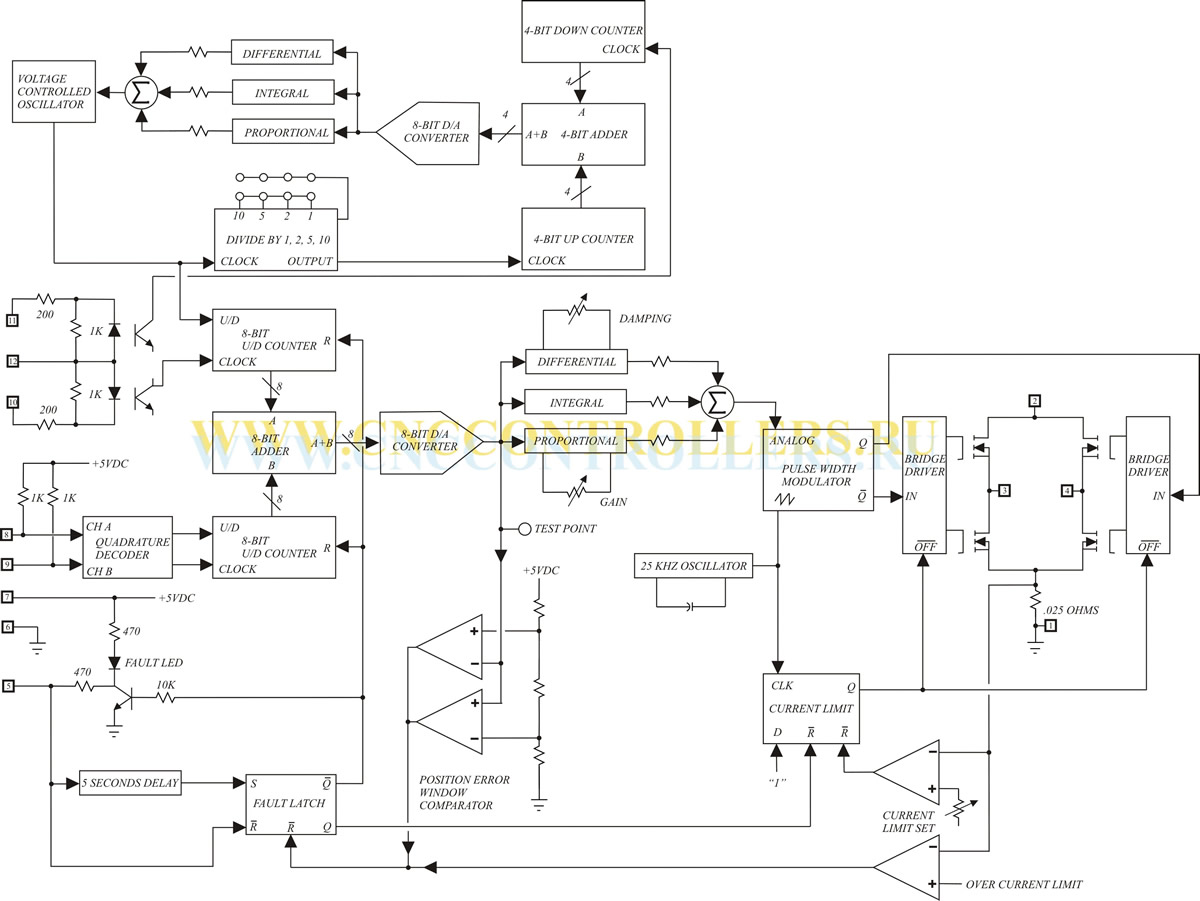
Драйвер ADR940 отличается от серводрайвера ADR920 наличием платы умножителя сигнала STEP.
Для чего она нужна?
Допустим, у Вас медленное устройство управления, а Вам нужно достичь высокую скорость вращения, то с помощью платы умножителя, переключая джемпера на ней, Вы можете получить из 1 импульса Step 10 импульсов, 5 импульсов, 2 и 1 импульс. Соответственно, разрешение Вашего энкодера уменьшится в 10, в 5, либо в 2 раза.
|
|
Cтруктурная схема серводрайвера ADR920 |
Cтруктурная схема ADR940 |
|