При подключении двигателя к серводрайверу соблюдайте полярность. В случае несоблюдения полярности подключения двигателя драйвер будет выдавать ошибку при любой попытке начать с ним работать.
Для начала работы с драйвером необходимо к драйверу подключить двигатель, энкодер, а также потребуется устройство управления, формирующее сигналы Step и Dir. Об особенностях подключения энкодера см. здесь.
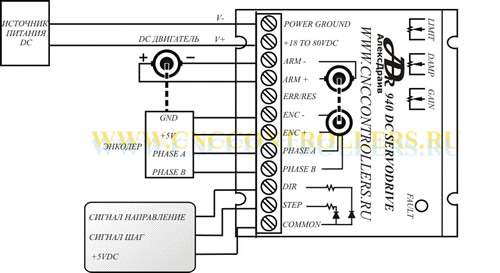
Если Ваш двигатель со стартером в виде постоянных магнитов, подключите его к серводрайверу по нижеприведенной схеме:
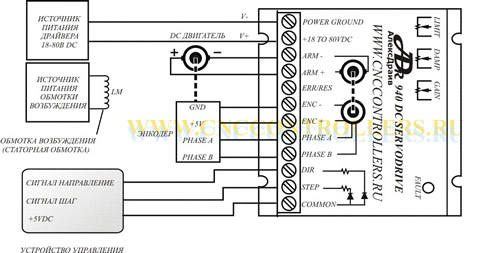
Если Ваш двигатель с обмоткой возбуждения, то для работы с таким двигателем Вам потребуется два источника питания. Один - для питания драйвера, к которому подключается якорь двигателя и второй источник питания для питания обмотки возбуждения как показано на рисунке:
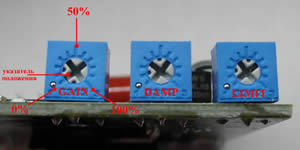
Перед включением источника(ов) питания установите подстроечные резисторы, расположенные на задней станке драйвера следующим образом: подстроечный резистор LIMIT в соответствии с предполагаемым током потребления Вашего двигателя, крайнее левое положение на рисунке соответствует току 0,3А, крайнее правое положение соответствует току 20А, подстроечный резистор GAIN (регулятор чувствительности ПИД к работе энкодера) установите в крайнее левое положение, подстроечный резистор DAMP установите в положение четверти от полной шкалы:
Подключите к серводрайверу устройство управления, соблюдая полярность подачи сигналов Step и Dir.
Включите источник(и) питания.
На серводрайвере загорится светодиод ошибки, двигатель должен молчать.
Для начала работы с драйвером необходимо подать команду RESET, для чего на клемму серводрайвера ERR/RES необходимо подать +5В DC относительно Power Ground и удержать +5В на этой клемме в течение нескольких секунд, пока светодиод ошибки не потухнет. Наиболее простой способ сделать это - закоротить клемму ENC+ и ERR/RES. После того как серводрайвер перейдет в рабочее состояние (светодиод ошибки погаснет), Вы услышите моторное "пение". Далее с помощью регуляторов Damp и Gain добейтесь оптимальной работы двигателя, помня о следующем:
Регуляторы усиления и демпфирования GAIN и DAMP взаимосвязаны друг с другом. Если Вы увеличиваете регулятор GAIN, необходимо увеличивать регулятор DAMP, чтобы установить критическое демпфирование.
Будьте внимательны: увеличивая GAIN, не увеличивая DAMP, может заставить двигатель уходить в режим сильных колебаний, чем более высокая GAIN установлена, тем более шумно будет себя вести двигатель в состоянии остановлено.
Подавая с устройства управления импульсы Step и сигнал Dir, управляйте двигателем.
ВНИМАНИЕ! Максимальная частота сигнала Step не должна превышать максимальную частоту вращения двигателя, т.е. например, у Вас двигатель с частотой вращения 3600 оборотов в минуту, энкодер 1024 инкремента, находим частоту вращения двигателя в секунду 3600 оборотов в минуту / 60 секунд = 60 оборотов в секунду. Вычисляем максимальную частоту импульсов Step: 60 оборотов в секунду х 1024 инкремента = 61440 Гц. При превышении данной частоты драйвер будет выдавать ошибку (загорится светодиод ошибки).
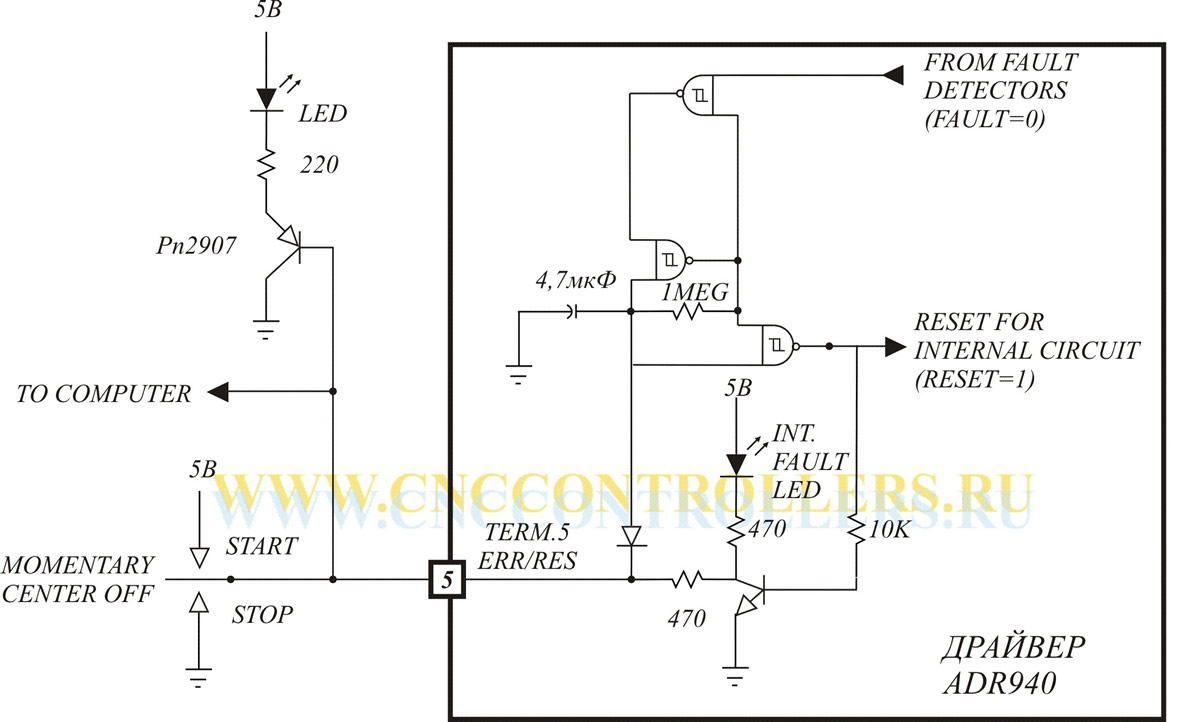
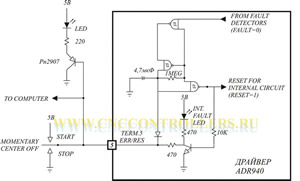
Для организации внешней индикации состояния драйверов ADR920/ADR940 можно подключить внешний светодиод ошибки по схеме, показанной ниже:
Для организации системы ЧПУ на основе программы типа Mach3 для согласования сигналов с LPT-портом IBM PC-совместимого компьютера рекомендуем использовать плату DCM4AXIS. |