|
Для управления серводрайвером используются следующие управляющие сигналы:
- Power Ground Общий провод источника питания драйвера.
- +18 to 80 VDC положительный провод источника питания драйвера.
- ARM- Минусовой провод питания двигателя
- ARM+ Плюсовой провод питания двигателя
ВНИМАНИЕ! Следите за полярностью подключения двигателя. В случае несоответствия полярности включения двигателя сигналам энкодера драйвер будет выдавать ошибку.
- ERR/RES. Данный вывод имеет двойное назначение. После первого включения или при возникновении ошибки этот вывод следует замкнуть на вывод ENC+ (или подать +5В DC относительно Power Ground) для установки драйвера в рабочее состояние. Второе назначение вывода - контроль состояния драйвера. В рабочем состоянии драйвера на выводе присутствует логическая "1". При возникновении ошибки состояние вывода переходит в логический "0". Контролировать состояние вывода и подавать сигнал сброса требуется относительно Power Ground.
- ENC- Общий провод источника питания энкодера.
- ENC+ Выход +5VDC для питания энкодеров. Используется для питания энкодеров в током потребления до 50мА.
- Phase A - Вход сигнала А энкодера. Вход не оптоизолирован. Уровень подаваемого сигнала должен соответствовать уровню TTL
- Phase B - Вход сигнала В энкодера. Вход не оптоизолирован. Уровень подаваемого сигнала должен соответствовать уровню TTL
- Dir. Сигнал используется для управления направлением вращения двигателя. Сигнал оптоизолирован, ток потребления по входу порядка 15 мА. Для драйвера ADR920 сигнал подается относительно + 5В DC. У драйвера ADR940 выбор полярности сигнала относительно общего провода, либо относительно +5В осуществляется джемперами на платке расширения.Сигнал имеет два активных состояния: логический "0" и логическую "1", определяющие направление вращения двигателя. Конкретное направление вращения зависит от полярности включения обмоток двигателя
- Step. Сигнал оптоизолирован, ток потребления по входу порядка 15 мА. Для драйвера ADR920 сигнал подается относительно + 5В DC. У драйвера ADR940 выбор полярности сигнала относительно общего провода, либо относительно +5В осуществляется джемперами на платке расширения. При каждом перепаде сигнала на этом входе двигатель поворачивается на 1 инкремент энкодера. Максимальная частота сигнала Step не должна превышать максимальную частоту вращения двигателя, т.е. например, у Вас двигатель с частотой вращения 3600 оборотов в минуту, энкодер 1024 инкремента, находим частоту вращения двигателя в секунду 3600 оборотов в минуту / 60 секунд = 60 оборотов в секунду. Вычисляем максимальную частоту импульсов Step: 60 оборотов в секунду х 1024 инкремента = 61440 Гц. При превышении данной частоты драйвер будет выдавать ошибку (загорится светодиод ошибки).
ВНИМАНИЕ! Помните, что при применениии линейного энкодера Вам нужно учитывать линейное перемещение, шаг которого зависит от дискретности Вашего энкодера и совершенно не зависит от шага ШВП или иного привода. При использовании углового энкодера в расчет берется именно угловое перемещение энкодера, шаг Вашего сервопривода будет составлять перемещение Вашей сервосистемы за один оборот двигателя, деленный на количество инкрементов энкодера.
- Common - общий провод устройства управления. Для сигнала относительно +5VDC на него подается +5В от устройства управления. При подаче сигналов управления относительно общего провода на него подается общий провод устройства управления.
Для организации системы ЧПУ на основе программы типа Mach3 для согласования сигналов с LPT-портом IBM PC-совместимого компьютера рекомендуем использовать плату DCM4AXIS.
Подключение сигналов управления
 |
|
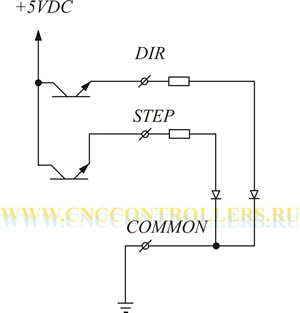
Подключение относительно +5VDC.
Этот режим подключения используется для серводрайверов ADR920 и при установке джамперов "+5VDC" в драйверах ADR940 |
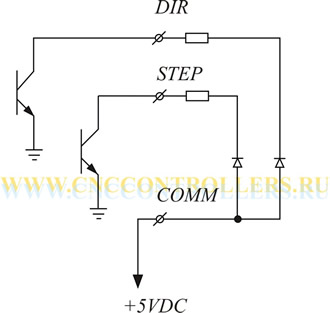
Подключение относительно общего провода.
Этот режим используется в драйверах шагового двигателя ADR940 при установке джампера относительно "GND". |
|