|
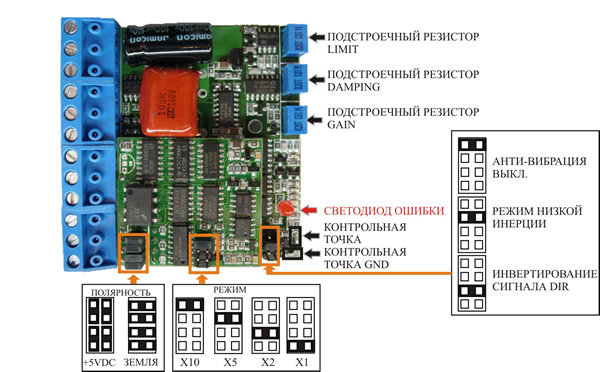
Джамперы:
- Антивибрация выкл. - джампер включает / выключает режим коррекции ПИД-регулятора на низкую вибрацию вала двигателя во время паузы.
- Режим низкой инерции - джампер включает / выключает режим ПИД-регулятора для уменьшения инерционного прокручивания вала двигателя по окончании последнего сигнала Step.
- Инвертирование сигнала Dir - установка джемпера инвертирует сигнал Dir.
- Полярность - при установке джамперов ОБЩИЙ ЗЕМЛЯ сигналы управления на драйвер подаются относительно общего провода устройства управления. При установке джампера ОБЩИЙ + 5 VDC сигналы управления на драйвер подаются относительно + 5 В управляющего устройства (устройство управления использует выход с открытым коллектором).
- Режимы - При установке джемперов:
- Х10 - входной импульс Step умножается на 10 (из одного импульса Step плата формирует 10 импульсов)
- Х5 - входной импульс Step умножается на 5 (из одного импульса Step плата формирует 5 импульсов)
- Х2 - входной импульс Step умножается на 2 (из одного импульса Step плата формирует 2 импульса)
- Х1 - входной импульс Step умножается на 1 (из одного импульса Step плата формирует 1 импульс)
Регуляторы:
- Limit - Вращением этого регулятора задается максимальный ток двигателя в пределах от 0,3 до 20А
- Damping - Вращением этого регулятора регулируйте режим демпфирования ПИД-регулятора.
- Gain - Вращением этого регулятора регулируйте чувствительность ПИД-регулятора к сигналам энкодера.
Индикатор
Если светодиод не включен, серводрайвер работает нормально.
Включенный светодиод индицирует об ошибках серводрайвера, которыми могут быть:
- ток потребления двигателя превысил значение, установленное резистором Limit.
- вал двигателя по инерции прокрутился более чем на 128 инкрементов энкодера.
- частота следования импульса Step превышает максимальную частоту вращения вала двигателя.
|

