Преобразователи угловых перемещений предназначены для информационной связи по положению между позиционируемым объектом и устройством числового программного управления (УЧПУ) или устройством цифровой индикации (УЦИ). Особенность угловых оптоэлектронных растровых преобразователей перемещений заключается в использовании в качестве меры длины радиальной шкалы, являющейся носителем регулярного и кодового растров. Возможность нанесения штрихов растров с субмикронной точностью на материалы с заданным коэффициентом линейного расширения, стабильность их геометрического положения, достаточно высокая степень защищенности конструктивного исполнения, а также их высокая устойчивость к внешним воздействиям обеспечили растровым преобразователям перемещений широкий спектр областей промышленного и научного применения.
Принцип действия преобразователей угловых перемещений
Преобразователь содержит два кинематически связанных функциональных узла: радиальную растровую шкалу 1, жестко связанную с валом преобразователя, и растровый анализатор 2 неподвижного считывающего узла.
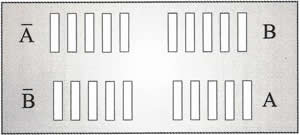
Радиальная растровая шкала (далее везде лимб) содержит две концентрические информационные дорожки: регулярного растра и референтных меток Б.
Растровый анализатор содержит окна накапливающего (инкрементного) считывания и участок референтной метки Д. Окна позиционно согласогласованы с дорожкой регулярного растра лимба и имеют внутри растры А, -А и В, -В с шагом, равным шагу регулярного растра лимба. При этом, в каждой паре окон растры смещены друг относительно друга на величину, равную половине их шага, а взаимный пространственный сдвиг растров между парами окон состовляет 1/4 шага растров. Последовательно с растровыми окнами расположено прозрачное окно Г. Референтная метка Д позиционно согласована с дорожкой референтных меток лимба.
Считывающий узел решает задачу реализации оптических растровых и кодовых сопряжений, информативно соответствующих величине углового перемещения, и задачу считывания, обработки и анализа текущих значений оптически информативных параметров указанных сопряжений.
|
растровый анализатор
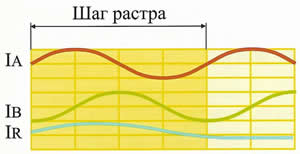
Сигнал IA опережает сигнал IB при вращении по часовой стрелке измерительного лимба 1 жестко связанного с валом преобразователя. |
Конструктивно эти задачи решает инкрементный узел преобразователя. Первую из них решает оптико-механическая часть этого узла, обеспечивающая необходимую точность оптического растрового сопряжения лимба и анализатора, а также соосность последних по отношению к оси вращения вала. Вторую реализуют осветители, плата квадрантных фотоприемников (фотодиодов) и плата электрической схемы выделения и обработки информации о перемещении. В качестве осветителей используются излучающие диоды 3 и 4, осуществляющие засветку соответствующих окон анализатора и пространственно согласованных с ними фотоприемных площадок (секций) квадрантных фотодиодов 5 и 6.
Излучающий диод 3, конденсатор 7, формирующий параллельный пучок лучей осветителя окна А, -А и В, -В анализатора и фотоприемник 6 образуют так называемый канал считывания.
Требование повышенной точности преобразователей диктует применение двух или четырех таких диаметрально расположенных каналов считывания.
Принцип работы преобразователей угловых перемещений основан на регистрации относительной величины прошедшего через растровое сопряжение потока оптического излучения как координатно-периодической функции взаимного углового положения регулярного растра лимба и растров окон анализатора.
При повороте входного вала преобразователя относительно его корпуса растровые сопряжения лимба и анализатора моделируют проходящие через них потоки излучения, воспинимаемые соответствующими секциями квандратного фотодиода 6.
Упомянутое выше сочетание пространственных фаз растров А, В и -А, -В обуславливает аналогичные фазовые соотношения электрических сигналов, снимаемых с секций фотоприемника 6. Данное обстоятельство позволяет сформировать два ортогональных координатно-периодических сигнала IA и IB, исключив из них постоянную составляющую. Взаимный характер измененияуказанных сигналов дает возможность определить направление регистрируемого угла поворота, а число их колебаний при данном перемещении - их величину. Специальная обработка сигналов IA и IB, основанная на современных методах, их координатной интерполяции, позволяет обеспечить контроль угловых перемещений с дискретностью, много меньшей периода регулярного растра.
Для возможности задания собственного начала отсчета преобразователь вырабатывает сигнал IR референтной метки. в общем случае, один раз за оборот вала.
Для формирования указанного сигнала используется канал считывания взаимного положения референтных меток Б и Д лимба и анализаторы соответственно. Эти метки идентичны и представляют собой участок специального растра с заданной функцией расположения штрихов и их ширины.
В процессе их совмещения с двух секций фотоприемника 5, оптически сопряженных с референтной меткой Д, снимается аналоговый сигнал IR координатно-зависимой величины с ярко выраженным максимумом. Этот сигнал используется устройством обработки для координатной привязки положения вала к началу отсчета преобразователя. При этом учитывется значение опорного сигнала, снимаемого с двух других секций фотоприемника 5, соответствующих прозрачному окну Г анализатора.
Датчик перемещения, датчик угловой, датчик поворота, датчик угла, датчик угловых перемещений, инкрементный энкодер, оптический энкодер.
|