Преобразователи линейных перемещений предназначены для информационной связи по положению между позиционируемым объектом и устройством числового программного управления (УЧПУ) или устройством цифровой индикации (УЦИ). Особенность линейных оптоэлектронных растровых преобразователей перемещения заключается в использовании в качестве меры длины линейной шкалы, являющейся носителем регулярного и кодового растров. Возможность нанесения штрихов растров с субмикронной точностью на материалы с заданным коэффициентом линейного расширения, а также стабильность их геометрического положения позволяют создавать преобразователи 3-4 классов точности.
Высокая степень защищенности конструктивного исполнения преобразователей, а также их высокая устойчивость к внешним воздействиям обеспечили растровым преобразователям широкий спектр областей промышленного и научного применения.
Принцип действия преобразователей линейных перемещений
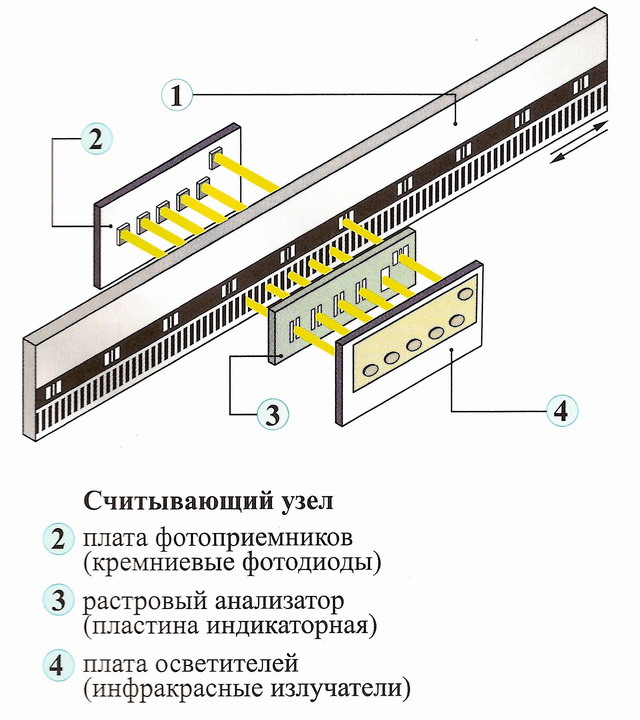
В основу работы преобразователей перемещения положен метод оптоэлектронного сканирования штриховых растров. При относительном перемещении шкалы 1 и анализатора 3 сопряжения регулярного растра шкалы с растрами анализатора модулируют проходящий через них потоки излучения, воспринимаемые соответствующими фотоприемниками. Растровая шкала содержит две параллельные информационные дорожки: регулярного растра и референтных меток.
Растровый анализатор содержит 4 окна А, А, В, В инкрементного считывания и окно референтной метки Б. Названные выше 4 окна позиционно согласованы с дорожкой регулярного растра шкалы. Шаги растров в окнах равны шагам регулярного растра шкалы (20 мкм или 40 мкм). При этом в каждой паре окон растры смещены друг относительно друга на величину, равную половине их шага, а взаимный пространственный сдвиг растров между парами окон составляет четверть шага растров. Последовательно с растровыми окнами расположено прозрачное окно Г. Референтная метка Б позиционно согласована с дорожкой референтных меток шкалы.
Считывающий узел (считывающая головка) преобразователя перемещений решает задачу реализации оптических растровых и кодовых сопряжений, информативно соответствующих величине линейного перемещения, а также задачу считывания, обработки и анализа текущих значений оптически информативных параметров указанных сопряжений.
Конструктивно первую задачу решает каретка, жестко связанная с анализатором, находящаяся через подшипники качения в постоянном контакте со шкалой, что делает возможным относительное перемещение шкалы и анализатора. Вторую задачу реализуют платы фотоприемников 2 и осветителей 4, установленные на ту же каретку, и плата электрической схемы выделения и обработки информации о перемещении, расположенная в корпусе считывающей головки. Плата осветителей содержит шесть излучающих диодов, обеспечивающих засветку соответствующих окон анализатора, и пространственно согласованных с ними приемных площадок шести фотодиодов платы 2.
Построенный таким образом канал считывания информации позволяет сформировать два ортогональных периодических сигнала UA и UB и сигнал нулевой метки UR . По взаимному отставанию либо опережению сигнала UA относительно UB определяется направление перемещения каретки с анализатором, а по количеству перепадов сигнала UA или UB определяется пройденный путь кареткой.
|